CKF designed and built an automated sack palletising solution for our customer which unpacks pallets of sacked product, places a label on each sack and then re-palletises the bags. As well as an increase in throughput, reduced costs and increased traceability; the solution offers flexibility as it has the capability to process both paper and plastic bags.
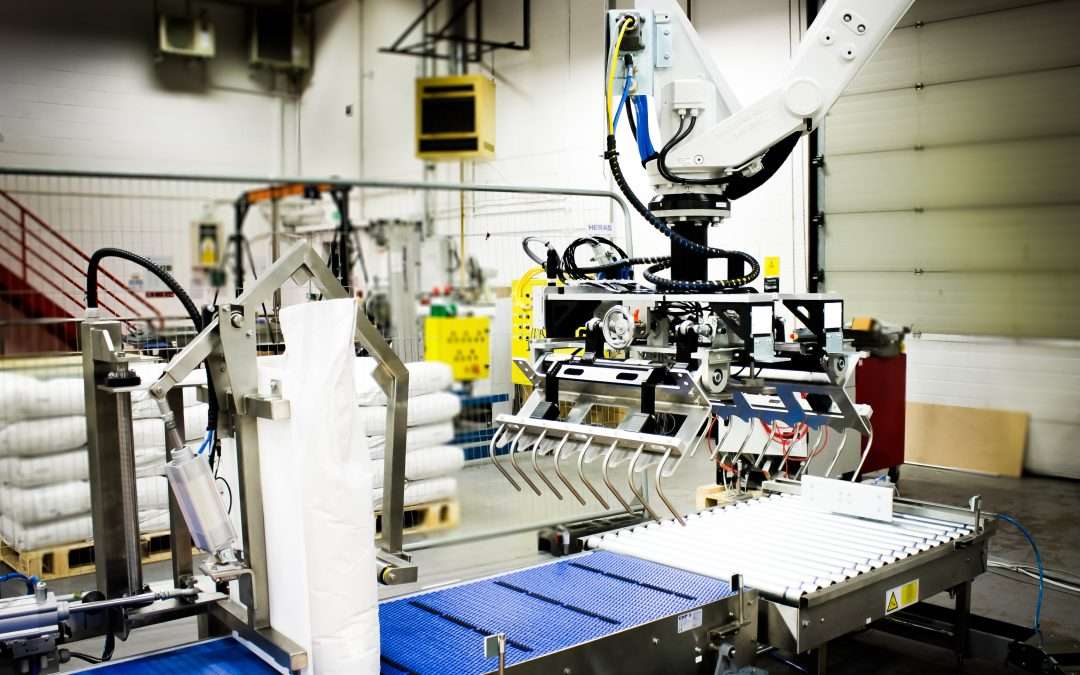
The system scans the full pallets of sacks using a barcode reader when they are delivered to the infeed at the start of the pallet roller. The pallet then progresses along the powered roller conveyers until it hits the blade stop, once in this position the sacks are then unloaded by the robot, using a suction gripper head. The Pick Robot system is made up of an ABB IRB 2600 robot which is a 6 axis articulated arm robot manipulator designed to handle a load of up to 20 kg at a reach of 1650 mm. A camera and four sensors are mounted to the robot. The robot manipulator positions the camera to take an image of the next sack to be unpacked. The image is analysed by the Neuro Check industrial vision system and the position data is used for picking. The 4 sensors identify the skew angle and height of the sack.
The combined data received from the vision system and sensors are used by the ABB IRB 6700 manipulator to collect the sack using a Palamatic sack vacuum pad. The sack is transferred to either the sack turnover unit or sack belt conveyer depending upon the product type. Both robots are controlled by an IRC5 controller with MultiMove® incorporated which enables multiple robots to make complex movements safely in the same work space.
The system has 2 conditioning units that prepare the sack in readiness to receive an A4+ label, the sacks then enter the labelling area where the label is applied by a Harland Label Applicator. Once the label has been applied, the sacks are then scanned, the data recorded and the sack continues along the modular belt conveyor to the vertical conditioning unit. Following conditioning, the sack is then ready to progress onto the sack collection area for re-palletising.
“Our customer is in the pharmaceutical industry and the large labels had to be perfectly aligned with no bubbles or imperfections in order for the end-user to accept the product. Any bags that don’t meet these standards are rejected. Our automated system offers a level of accuracy that could never be achieved with the manual application of labels and has been operating successfully for a number of months” Jamie Quinton, CKFSystems
The system positions the empty pallet at the correct datum, ready for restacking. The robot gathers the sacks one at a time from the pick conveyer and starts to re-stack the pallet, with the labels facing upwards. Once the pallet has been re-stacked it’s then released for onward travel to the pallet labelling turntable.
The pallet labelling turntable incorporates a work platform and pallet position control point. On receiving the repacked pallet, the operator can rotate the pallet through 90°, allowing the operator to attach a label to each side of the pallet, if required. Alternatively, the process is automated and the pallet is turned through 90° and transferred to the pallet wrapping conveyor without any label or operator intervention.
Once the labels have been applied and verified the pallet is then released for transfer to a Maillis ring wrapping machine. The pallet is released for transfer to the end of the conveyer for the final data capture and collection by a forklift truck